Discrete PID
Description
Discrete Proportional-Integral-Derivative (PID) Controller defined as:
Kp + \frac{Ki\cdot T}{z - 1} + Kd\cdot (\frac{1-z^{-1}}{T})
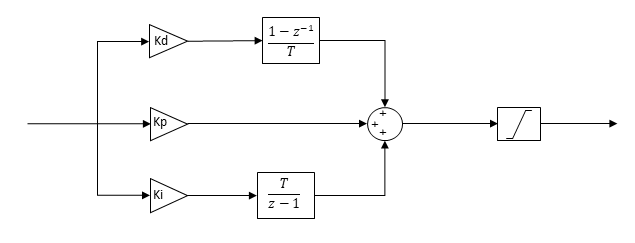
Regarding the derivative low-pass filter, the saturation and the antiwind-up method: read the documentation of the continuous PID for more information.
Library
Control > Discrete
Parameters
| Property | Display Name | Parameter Type | Description |
|---|---|---|---|
| Kp | Kp | DoubleParameter | Proportional gain |
| Ki | Ki | DoubleParameter | Integral gain |
| Kd | Kd | DoubleParameter | Derivative gain |
| Umin | Umin | DoubleParameter | Minimal saturation |
| Umax | Umax | DoubleParameter | Maximal saturation |
| Kb | Kb | DoubleParameter | Antiwindup correction factor |
| SamplingTime | Sampling Time [s] | DoubleParameter | Sampling Time |
| Iinit | Iinit | DoubleParameter | Initial integral contribution |
| IntegrationMethod | Anti-Windup Integration method | PIDIntegrationMethodParameter | Integration method |
| Kf | Kf | DoubleParameter | Derivative low-pass filter gain |
Pins
| Property | Pin Name | Type | Description |
|---|---|---|---|
| In | In | ControlIn | Input |
| Out | Out | ControlOut | Output |
Default Size
| Width | Height |
|---|---|
| 6 | 4 |