PID
Description
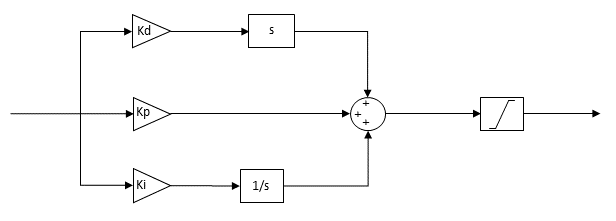
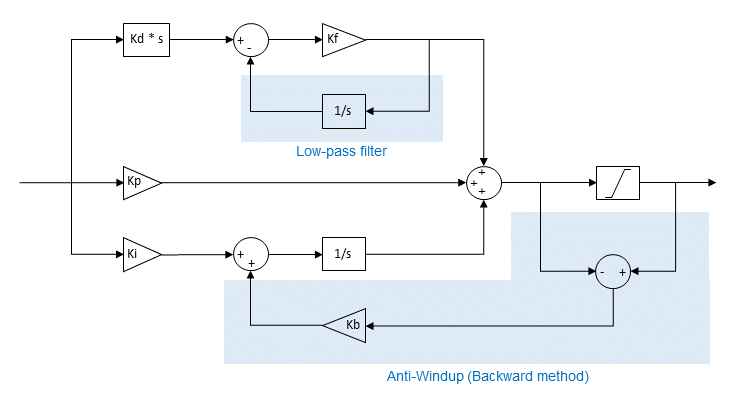
Continuous Proportional-Integral-Derivative (PID) Controller defined as:
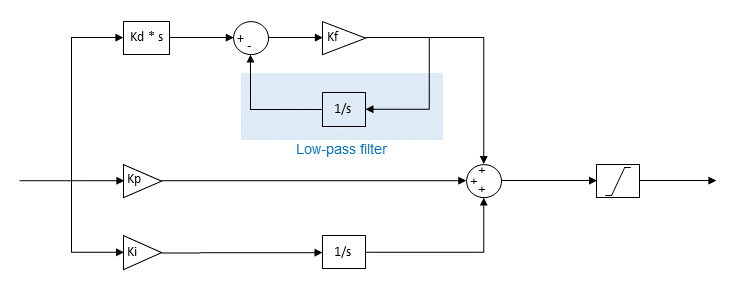
Derivative function: A first-order low-pass filter can be applied to the derivative term to reduce noise and prevent instability. Set Kf > 0 to enable the filter.The equivalent filter time constant is:
Output saturation: The parameters Umin and Umax define the lower and upper limits of the controller output. When saturation occurs, an anti-windup mechanism can be applied to the integral term. Three modes are available:
-
"NoAntiWindup": Disables the anti-windup mechanism. The integrator continues to accumulate during saturation, which may cause a delay before the output desaturates.
-
"ConditionalIntegration": Activates a conditional anti-windup method. When the PID output is saturated and the output (u) and the error(e) have the same sign, the integrator is instantly frozen.
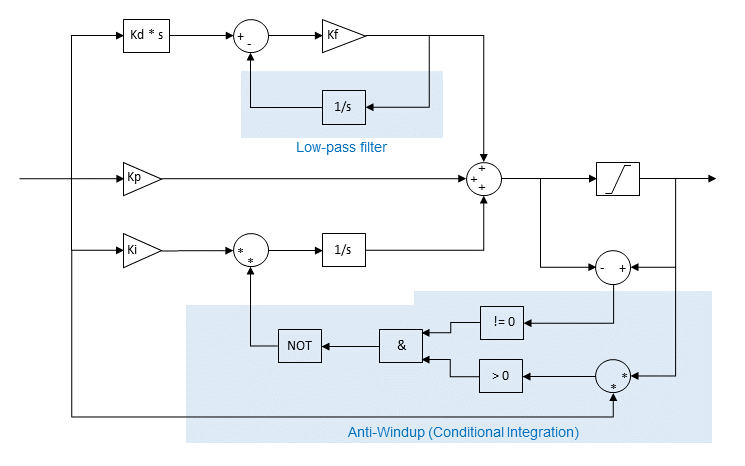
- "BackCalculation": Activates a feedback correction loop on the integrator. When the PID output saturates, a feedback signal adjusts the integral term to reduce windup. The loop gain Kb defines the speed of this correction.
Library
Control > Continous
Parameters
| Property | Display Name | Parameter Type | Description |
|---|---|---|---|
| Kp | Kp | DoubleParameter | Proportional gain |
| Ki | Ki | DoubleParameter | Integral gain |
| Kd | Kd | DoubleParameter | Derivative gain |
| Umin | Umin | DoubleParameter | Minimal saturation |
| Umax | Umax | DoubleParameter | Maximal saturation |
| Kb | Kb | DoubleParameter | Antiwindup correction factor |
| SamplingTime | Sampling Time [s] | DoubleParameter | Sampling Time |
| Iinit | Iinit | DoubleParameter | Initial integral contribution |
| IntegrationMethod | Anti-Windup Integration method | PIDIntegrationMethodParameter | Integration method |
| Kf | Kf | DoubleParameter | Derivative low-pass filter gain |
Pins
| Property | Pin Name | Type | Description |
|---|---|---|---|
| In | In | ControlIn | Input |
| Out | Out | ControlOut | Output |
Default Size
| Width | Height |
|---|---|
| 8 | 4 |