JMAG-RT IM
Description
Squirrel Cage Induction Machine block using JMAG-RT model
JMAG-RT model is a look-up table base motor solution for power electronics/system simulators developed by JSOL Corporation. It solves motor differential equations using parameters from look-up tables created by electromagnetic FEA software JMAG-Designer. JMAG, JMAG-Designer and JMAG-RT are registered trademarks of JSOL Corporation (https://www.jmag-international.com/).
Electrical model and equations
In this block, the below equation is used to represent the motor dynamics.
Where v_sα is α-axis stator voltage [V], v_sβ is β-axis stator voltage[V], i_sα is α-axis stator current[A], i_sβ is β-axis stator current[A], i_rα is α-axis rotor current[A], i_rβ is β-axis rotor current[A], R_s is stator phase resistance[Ω], R_r is rotor resistance[Ω], ω is rotor speed in electrical angle[rad / sec], ϕ_sα is α-axis stator flux[Wb], ϕ_sβ is β-axis stator flux[Wb], ϕ_rα is α-axis rotor flux[Wb], ϕ_rβ is β-axis rotor flux[Wb],
The magnetic flux in induction motors can be represented using the inductance as follows.
Where L_s is the stator self-inductance[H], L_r is the rotor self-inductance[H], L_m is the mutual inductance across from the stator to the rotor[H].
Information
In the JMAG-RT IM block, the motor differential equation will be solved using a module developed by JSOL Corporation. For details, contact the JSOL Corporation (https://www.jmag-international.com/contact/) or a distributor in your country.
Electromechanical equations
Electro-magnetic torque:
Mechanical rotational speed \Omega:
Iron loss modeling
Following iron loss types are available:
- [FundamentalCurrentBaseIronLoss]: Use iron loss tables created using the sinusoidal current in JMAG-Designer.
- [HarmonicsCurrentBaseIronLoss]: Use equivalent iron loss resistance tables to capture the iron loss components due to the carrier frequency and spatial harmonics.
- [UserDefinedIronLoss]: Uses iron loss tables added to JMAG-RT models from CSV files created by the user.
AC copper loss modeling
AC copper loss is a dissipation of electrical energy generated in copper winding due to the skin effect and proximity effects caused by the high-frequency current. Following AC copper loss types are available:
- [GeometryBaseACCopperLoss]: Use the motor slot geometry information in the JMAG-RT model to calculate the AC Copper loss.
- [UserDefinedACCopperLoss]: Use AC copper loss tables added to JMAG-RT models from CSV files created by the user.
Information
When AC copper loss is not used, the "copper loss" scope outputs only DC copper loss, i.e. a sum of the product of the phase resistance and the squared phase current. When AC copper loss is used, the "copper loss" scope outputs a sum of AC coper loss and DC copper losses
Skew
Skew is a technique used in the machine design process to twist motor geometry and reduce ripples in the current and the torque. The following skew types are available:
- [LinearSkew]
- [VSkew]
- [StepSkew]
Correction factors
Correction factors are applied to the input motor model in the following manner.
Where \phi is total magnetic flux linkage [wb], K_1 is a correction factor for inductance, K_2 is a correction factor for total magnetic flux linkage, K_3 is a correction factor for torque, K_5 is a correction factor for steel core, N is the original number of turns, N_1 is a new number of turns used to modify the inductance value and total magnetic flux linkage value as a function number of turns, and N_2 is a new number of turns used to modify the current used to refer to the look-up tables.
Thermal modeling
The phase resistance temperature dependency in the JMAG-RT IM block is modeled in the following manner.
Where \alpha is temperature correction factor for winding [ppm / ^\circ C ],
T_{cnow} is the coil temperature at the current step [^\circ C ],
T_{cbase} is the base coil temperature for windings[^\circ C ]
Information
Temperature correction factors and base temperatures are defined when the JMAG-RT model is created and stored in the JMAG-RT model. The temperature at the winding thermal port is the current temperature in the above equation. The losses dissipated in the machine at every step are available as the core losses and copper losses from the core thermal port and the winding thermal port respectively.
Library
Electrical > Motors
Parameters
| Property | Display Name | Parameter Type | Description |
|---|---|---|---|
| RttFilePath | RTT File Path | FilePathParameter | Path to the RTT library (String) |
| J | J - Rotor Inertia [kg.m²] | DoubleParameter | Rotor Inertia [kg.m²] |
| B | B - Rotor Friction Coefficient [N.m/(rad/s)] | DoubleParameter | Rotor Friction Coefficient [N.m/(rad/s)] |
| InitialSpeed | Rotor Initial Speed [rad/s] | DoubleParameter | Rotor initial speed [ rad/s] |
| NPP | NPP - Poles pairs | IntParameter | Number of pole pairs |
| Rs | Rs - Stator Phase Resistance [Ohm] | DoubleParameter | Phase resistance [Ohm] |
| AverageLossCalcFreq | AverageLossCalcFreq - Average Loss Calculation Frequency [Hz] | DoubleParameter | Average Loss Calculation Frequency [Hz] |
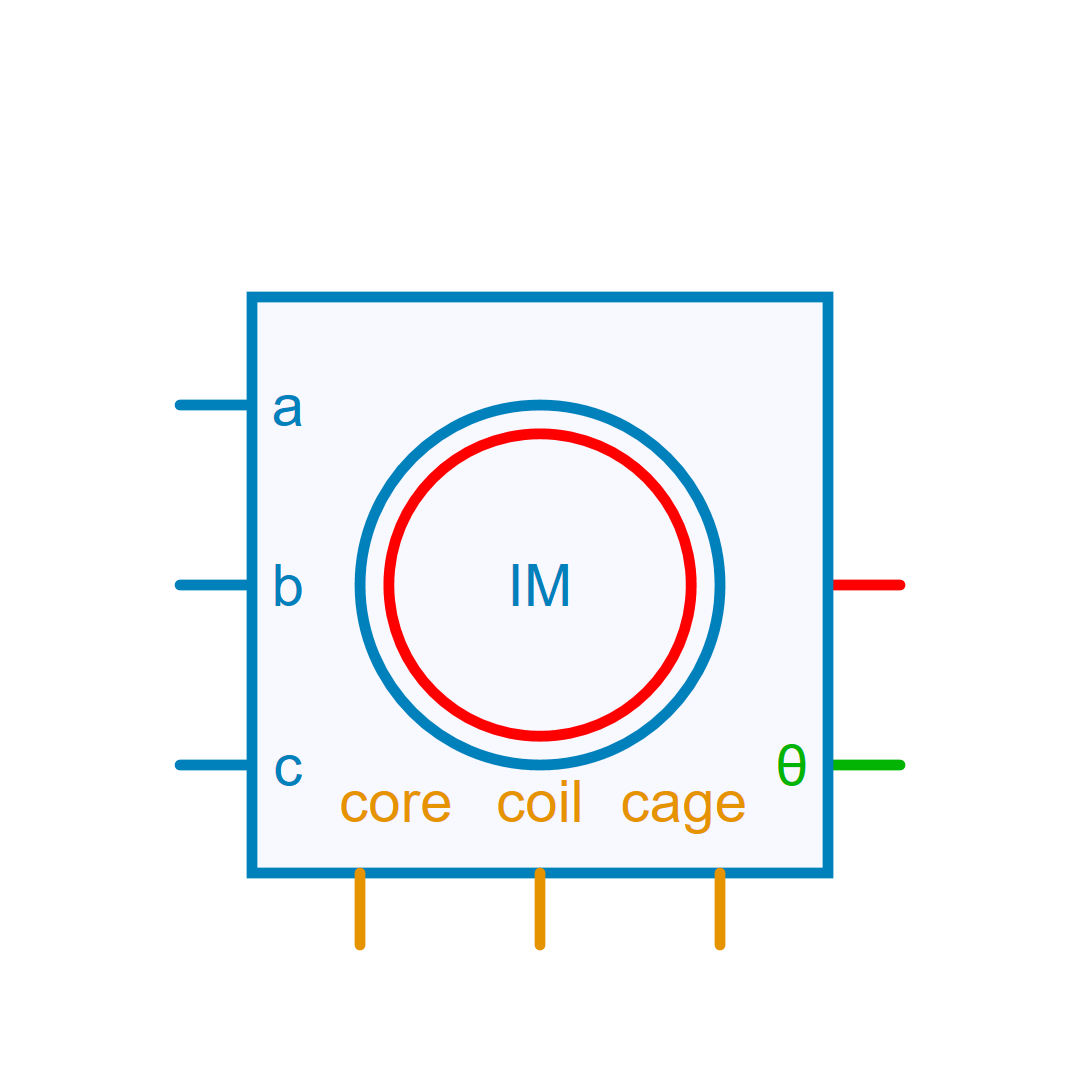
Pins
| Property | Pin Name | Type | Description |
|---|---|---|---|
| Pin_A | A | Electrical | Phase A (Electrical) |
| Pin_B | B | Electrical | Phase B (Electrical) |
| Pin_C | C | Electrical | Phase C (Electrical) |
| Pin_R | R | RotationalMechanical | Rotor (Rotational Mechanical) |
| Pin_Angle | Angle | ControlOut | Rotor Angle in radians, mechanical angle (Control) |
| Pin_Pcore | Core | Thermal | Core (Thermal) |
| Pin_Pwinding | Winding | Thermal | Winding (Thermal) |
| Pin_Pcage | Cage | Thermal | Cage (Thermal) |
Default Size
| Width | Height |
|---|---|
| 8 | 8 |