Squirrel Cage Induction Machine
Description
Squirrel Cage Induction Machine
A three-phase Squirrel Cage Induction Machine (IM). In this model, the parameter slip dependency can be modeled using a piecewise linear approximation. Often two-axis rectangular coordinate is employed to represent the machine dynamics. When the coordinate is fixed on the stator, it is called being in a stationary reference frame (αβ reference frame). Meanwhile, when the coordinate rotates in the synchronized speed with the excitation from the stator, it is called being in a synchronous reference frame (dq reference frame). All equations in this document are also expressed in the stationary reference frame.
Electrical model and equations
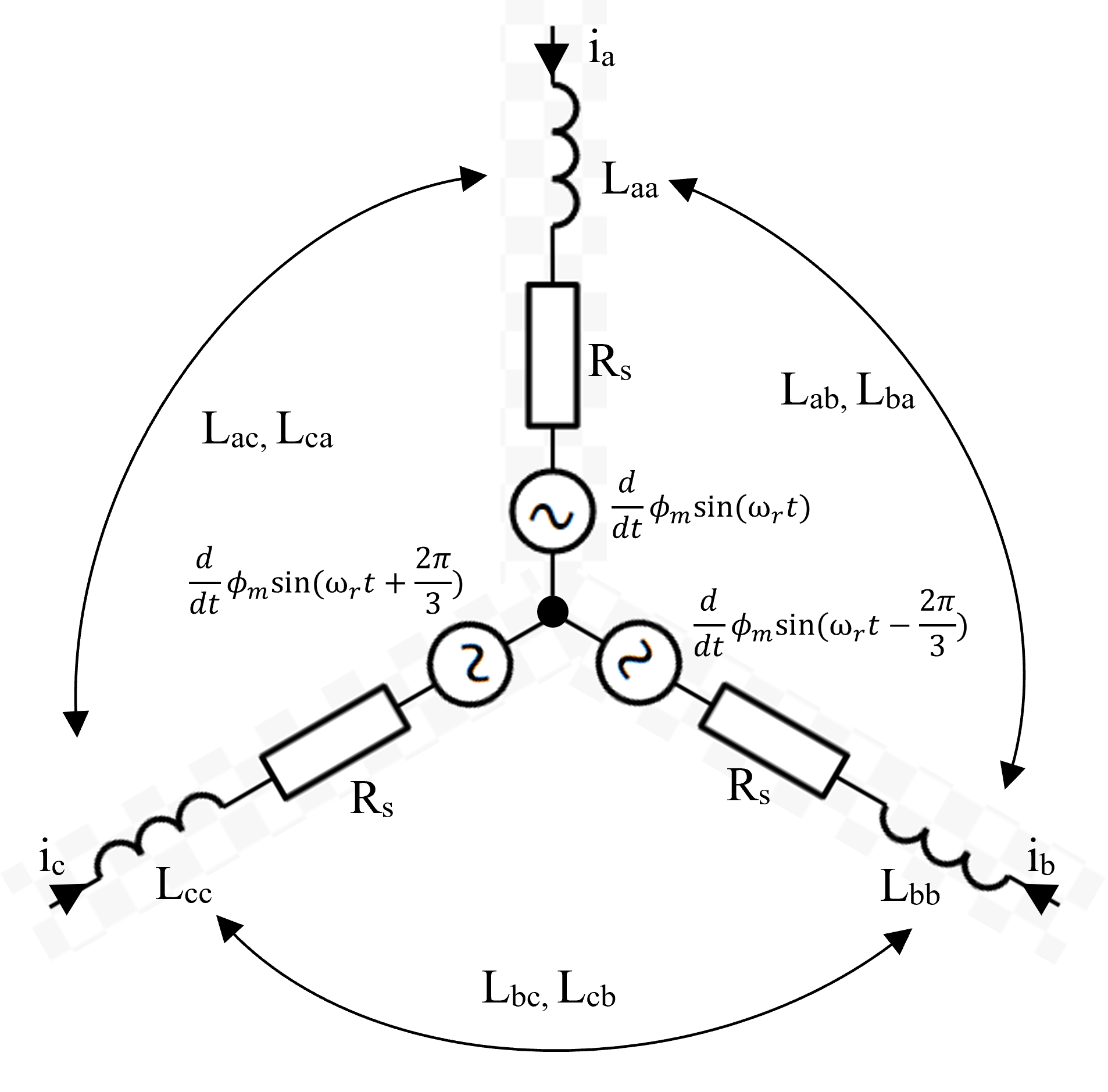
Where v_sαis α-axis stator voltage [V], v_sβ is β-axis stator voltage[V], i_sα is α-axis stator current[A], i_sβ is β-axis stator current[A], i_rα is α-axis rotor current[A], i_rβ is β-axis rotor current[A], R_s is Stator resistance[Ω], R_r is Rotor resistance[Ω], ω is Rotor speed in electrical angle[rad / sec], ϕ_sα is α-axis stator flux[Wb], ϕ_sβ is β-axis stator flux[Wb], ϕ_rα is α-axis rotor flux[Wb], ϕ_rβ is β-axis rotor flux[Wb],
The magnetic flux in induction motors can be represented using the inductance as follows. $$ \phi_{s\alpha} = L_s i_{s\alpha} + L_m i_{r\alpha} $$
Where L_s is Stator self-inductance[H], L_r Rotor self-inductance[H], L_m is Mutual inductance across from the stator to the rotor[H]
Electromechanical equations
Electro-magnetic torque:
Mechanical rotational speed \Omega:
Library
Electrical > Motors
Parameters
| Property | Display Name | Parameter Type | Description |
|---|---|---|---|
| Rs | Rs - Stator winding resistance [Ohm] | DoubleParameter | Stator Winding Resistance [Ohm] |
| Ls | Ls - Stator winding leakage inductance [H] | DoubleParameter | Stator winding leakage inductance [H] |
| Lr | Lr - Rotor leakage inductance [H] | DoubleMatrixParameter | Rotor leakage inductance [H] |
| Lm | Lm - Magnetizing inductance [H] | DoubleParameter | Magnetizing inductance [H] |
| J | J - Rotor Inertia [kg.m²] | DoubleParameter | Rotor Inertia [kg.m²] |
| B | B - Rotor Friction Coefficient [N.m/(rad/s)] | DoubleParameter | Rotor Friction Coefficient [N.m/(rad/s)] |
| InitialCurrent | Initial Current [A] | DoubleArrayParameter | Initial Current Vector [IA IB IC] |
| NPP | NPP - Poles pairs | IntParameter | Number of pole pairs |
Pins
| Property | Pin Name | Type | Description |
|---|---|---|---|
| Pin_A | A | Electrical | Phase A (Electrical) |
| Pin_B | B | Electrical | Phase B (Electrical) |
| Pin_C | C | Electrical | Phase C (Electrical) |
| Pin_R | R | RotationalMechanical | Rotor (Rotational Mechanical) |
| Pin_Angle | Angle | ControlOut | Rotor Angle in radians (Control) |
Default Size
| Width | Height |
|---|---|
| 8 | 8 |